Information for presenters :
- Oral Presentations: Each paper selected for oral presentation will be given 15 min in total. The presentation itself should not exceed 12 min, and as a result there should be left at least 3 min for questions and discussion.
- Poster Presentations: Posters should be formatted to DIN A0 size (841 x 1189 mm or 33.1 x 46.8 in) and in portrait orientation.
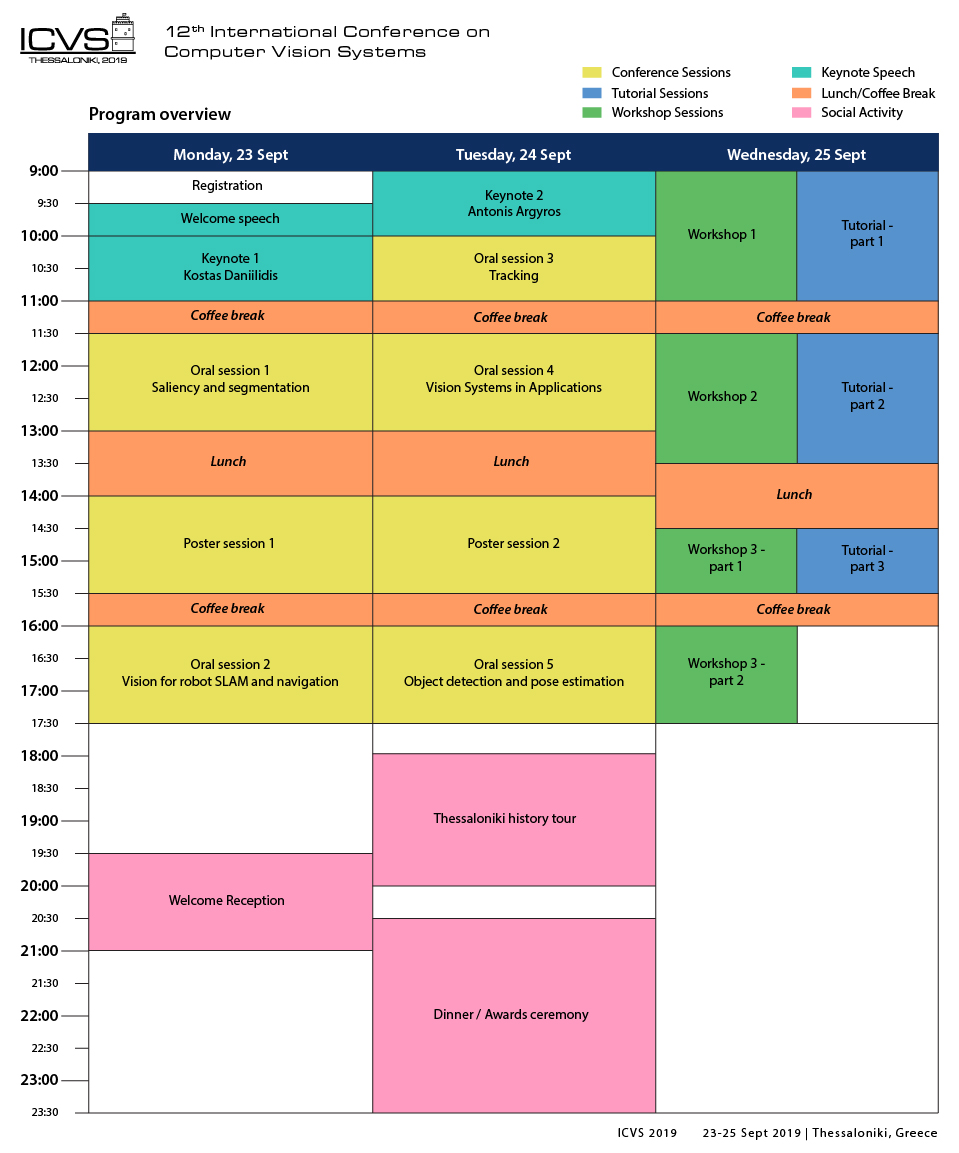
List of papers to be presented per session
Oral Session 1 : Saliency and Segmentation [Monday, Sep 23 @ 11:30-13:00]
Hall : Alexandros II
Session Chairs : Costas Panagiotakis, Nikolaos Dimitriou
- [11:30-11:45] "Hierarchical image inpainting by a deep context encoder exploiting structural similarity and saliency criteria"
Nikolaos Stagakis, Evangelia I. Zacharaki, Konstantinos Moustakas - [11:45-12:00] "Deep-learning-based computer vision system for surface-defect detection"
Domen Tabernik, Samo Sela, Jure Skvarc, Danijel Skocaj - [12:00-12:15] "A two-stage approach for commonality-based temporal localization of periodic motions"
Costas Panagiotakis, Antonis Argyros - [12:15-12:30] "Color-Guided Adaptive Support Weights for Active Stereo Systems"
Ioannis Kleitsiotis, Nikolaos Dimitriou, Konstantinos Votis, Dimitrios Tzovaras - [12:30-12:45] "Cross-domain Interpolation for UnpairedImage-to-Image Translation"
Jorge Lopez, Antoni Mauricio, Jose Diaz, Guillermo Camara - [12:45-13:00] "Detecting Video Anomaly with a Stacked Convolutional LSTM Framework"
Hao Wei, Kai Li, Haichang Li, Yifan Lyu, Xiaohui Hu
Oral Session 2 : Vision for robot SLAM and navigation [Monday, Sep 23 @ 16:00-17:30]
Hall : Alexandros II
Session Chairs : George Nikolakopoulos, Ioannis Kostavelis
- [16:00-16:15] "Open Space Attraction Based Navigation in Dark Tunnels for MAVs"
Christoforos Kanellakis, Petros Karvelis, George Nikolakopoulos - [16:15-16:30] "Semi-Semantic Line-Cluster Assisted Monocular SLAM for Indoor Environments"
Ting Sun, Dezhen Song, Dit-Yan Yeung, Ming Liu - [16:30-16:45] "Appearance-Based Loop Closure Detection with Scale-Restrictive Visual Features"
Konstantinos A. Tsintotas, Panagiotis, Giannis, Loukas Bampis, Antonios Gasteratos - [16:45-17:00] "V-disparity based Obstacle Avoidance for Dynamic Path Planning of a Robot-Trailer"
Efthimios Tsiogas, Ioannis Kostavelis, Dimitrios Giakoumis, Dimitrios Tzovaras - [17:00-17:15] "Feature-agnostic Low-cost Place Recognition for Appearance-based Mapping"
S. M. Ali Musa Kazmi, Mahmoud A. Mohamed, Bärbel Mertsching - [17:15-17:30] "Real-Time Binocular Vision Implementation on an SoC TMS320C6678 DSP"
Rui Fan, Sicheng Duanmu, Yanan Liu, Yilong Zhu, Jianhao Jiao, Mohammud Junaid Bocus, Yang Yu, Lujia Wang, Ming Liu
Oral Session 3 : Tracking [Tuesday, Sep 24 @ 10:00-11:00]
Hall : Alexandros II
Session Chairs : Antonis Argyros, Sotiris Manitsaris
- [10:00-10:15] "3D Hand Tracking by Employing Probabilistic Principal Component Analysis to Model Action"
Emmanouil Oulof Porfyrakis, Alexandros Makris, Antonis Argyros - [10:15-10:30] "Online Information augmented SiamRPN"
Edward Budiman Sutanto, Sukho Lee - [10:30-10:45] "A short-term biometric based system for accurate personalized tracking"
Georgios Stavropoulos, Anastasios Drosou, Dimitrios Tzovaras - [10:45-11:00] "Towards a Professional Gesture Recognition with RGB-D from Smartphone"
Pablo Vicente Monivar, Sotiris Manitsaris, Alina Glushkova
Oral Session 4 : Vision systems in Applications [Tuesday, Sep 24 @ 11:30-13:00]
Hall : Alexandros II
Session Chairs : Dimitris Chrysostomou, Richard Bormann
- [11:30-11:45] "Tillage machine control based on a vision system for soil roughness and soil cover estimation."
Peter Riegler-Nurscher, Johann Prankl, Markus Vincze - [11:45-12:00] "Grapes Visual Segmentation for Harvesting Robots Using Local Texture Descriptors"
Eftichia Vasileios Badeka, Theofanis Kalabokas, Konstantinos Tziridis, Alexander Nicolaou, Eleni Vrochidou, Efthimia Mavridou, George Athanasios Papakostas, Theodore Pachidis - [12:00-12:15] "Estimation of Wildfire Size and Location using a Monocular Camera on a Semi-Autonomous Quadcopter"
Lucas Goncalves de Paula, Kristian Hyttel, Kenneth Richard Geipel, Jacobo Eduardo de Domingo Gil, Iuliu Novac, Dimitrios Chrysostomou - [12:15-12:30] "Towards Automated Order Picking Robots for Warehouses and Retail"
Richard Bormann, Bruno Ferreira de Brito, Jochen Lindermayr, Marco Omainska, Mayank Patel - [12:30-12:45] "A computer vision system supporting blind people - The supermarket case"
Kostas Georgiadis, Fotis Kalaganis, Panagiotis Migkotzidis, Elisavet Chatzilari, Spiros Nikolopoulos, Ιοannis Kompatsiaris - [12:45-13:00] "Automated Mechanical Multi-sensorial Scanning"
Vaia Rousopoulou, Konstantinos Papachristou, Nikolaos Dimitriou, Anastasios Drosou, Dimitrios Tzovaras
Oral Session 5 : Object detection and pose estimation [Tuesday, Sep 24 @ 16:00-17:30]
Hall : Alexandros II
Session Chairs : Sotiris Malassiotis, Timothy Patten
- [16:00-16:15] "Real-time Lightweight CNN in Robots with Very Limited Computational Resources: Detecting Ball in NAO"
Qingqing Yan, Shu Li, Chengju Liu, Qijun. Chen - [16:15-16:30] "Leveraging Symmetries to improve Object Detection and Pose Estimation from Range Data"
Sergey V. Alexandrov, Timothy Patten, Markus Vincze - [16:30-16:45] "Planar Pose Estimation using Object Detection and Reinforcement Learning"
Frederik Norby Rasmussen, Sebastian Terp Andersen, Bjarne Grossmann, Evangelos Boukas, Lazaros Nalpantidis - [16:45-17:00] "Towards Meaningful Uncertainty Information for CNN based 6D Pose Estimates"
Jesse Richter-Klug, Udo Frese - [17:00-17:15] "Grasping Unknown Objects by Exploiting Complementarity with Robot Hand Geometry "
Marios Kiatos, Sotiris Malassiotis - [17:15-17:30] "Monte Carlo Tree Search on Directed Acyclic Graphs for Object Pose Verification"
Dominik Bauer, Timothy Patten, Markus Vincze
Workshop 1 [Cognitive and Computer Vision Assisted Systems for Energy Awareness and Behavior Analysis (C2VAS)]
[Wednesday, Sep 25 @ 09:00-11:00]
Hall : Kaliopi
- "An augmented reality game for energy awareness"
Piero Fraternali and Sergio Luis Herrera Gonzalez - "Energy consumption patterns of residential users: A Study in Greece"
Aristeidis Karananos, Asimina Dimara, Konstantinos Arvanitis, Christos Timplalexis, Stelios Krinidis and Dimitrios Tzovaras - "Overview of Legacy AC Automation for Energy-Efficient Thermal Comfort"
Michail Terzopoulos and Christos Korkas and Iakovos T. Michailidis and Elias Kosmatopoulos - "Can I Shift my Load? Optimizing Electrical Tariff for Tertiary Buildings"
Oihane Kamara-Esteban and Cruz E. Borges and Diego Casado-Mansilla - "Occupancy Inference Through Energy Consumption Data: A Smart Home experiment"
Adamantia Chouliara, Konstantinos Peppas, Apostolos C. Tsolakis, Thanasis Vafeiadis Stelios Krinidis and Dimitrios Tzovaras - "A Dynamic Convergence Algorithm for Thermal Comfort Modelling"
Asimina Dimara, Christos Timplalexis, Stelios Krinidis and Dimitrios Tzovaras - "Thermal Comfort Metabolic Rate and Clothing Inference"
Christos Timplalexis, Asimina Dimara, Stelios Krinidis and Dimitrios Tzovaras - "User-Centered Visual Analytics Approach for Interactive and Explainable Energy Demand Analysis in Prosumer Scenarios"
Ana I. Grimaldo and Jasminko Novak
Workshop 2 [Movement analytics and gesture recognition for Human- Machine Collaboration in Industry 4.0]
[Wednesday, Sep 25 @ 11:30-13:30]
Hall : Kaliopi
Keynote Speaker: Patrick Hénaff
[11:30-12:00] "Vision based Human-Robot motor coordination using adaptive central pattern generators"
- [12:00-12:15] "Real-time gestural control of robot manipulator through Deep Learning human-pose inference"
Jesus Bujalance Martin and Fabien Moutarde - [12:15-12:30] "A Comparison of Computational Intelligence Techniques for Real-Time Discrete Multivariate Time Series Classification of Conducting Gestures"
Justin Van Heek, Gideon Woo, Jack Park and Herbert H. Tsang - [12:30-12:45] "A Deep Network for Automatic Video-based Food Bite Detection"
Dimitrios Konstantinidis, Kosmas Dimitropoulos, Ioannis Ioakimidis, Billy Langlet and Petros Daras - [12:45-13:00] "Extracting the Inertia Properties of the Human Upper Body Using Computer Vision"
Dimitrios Menychtas, Alina Glushkova and Sotirios Manitsaris - [13:00-13:15] "Single fingertip detection using simple geometric properties of the hand image: a case study for augmented reality in an educational app"
Nikolaos Nomikos and Dimitris Kalles - [13:15-13:30] "Leveraging Pre-trained CNN Models for Skeleton-Based Action Recognition"
Sohaib Laraba, Joelle Tilmanne, and Thierry Dutoit
Workshop 3 [Vision-enabled UAV and counter-UAV technologies for surveillance and security of critical infrastructures (UAV4S)]
[Wednesday, Sep 25 @ 14:30-17:30]
Hall : Kaliopi
Keynote Speaker: Patrick Garnier
"Perspectives of counter-UAV technology through security of critical infrastructures"
- "Critical infrastructure security against drone attacks using visual analytics"
Xindi Zhang and Krishna Chandramouli - "Classification of Drones with a Surveillance Radar Signal"
Marco Messina and Gianpaolo Pinelli - "Minimal-time trajectories for interception of malicious drones in constrained environments"
Manuel Garcia, Antidio Viguria, Guillermo Heredia and Anibal Ollero - "UAV classification with deep learning using surveillance radar data"
Stamatios Samaras, Vasileios Magoulianitis, Anastasios Dimou, Dimitrios Zarpalas and Petros Daras - "UAV localization using panoramic thermal cameras"
Anthony Thomas, Vincent Leboucher, Antoine Cotinat, Pascal Finet, Mathilde Gilber - "Multimodal Deep Learning Framework for Enhanced Accuracy of UAV Detection"
Eleni Diamantidou, Antonios Lalas, Konstantinos Votis and Dimitrios Tzovaras - "Multi-scale Feature Fused Single Shot Detector for Small Object Detection in UAV Images"
Manzoor Razaak, Hamideh Kerdegari, Vasileios Argyriou and Paolo Remagnino - "Autonomous swarm of heterogeneous robots for surveillance operations"
Georgios Orfanidis, Savvas Apostolidis, Athanasios Kapoutsis, Konstantinos Ioannidis, Elias Kosmatopoulos, Stefanos Vrochidis and Ioannis Kompatsiaris
Tutorial Session : Adaptive Vision for Human Robot Collaboration
[Wednesday, Sep 25 @ 09:00-15:30]
Hall : Alexandros II
- Introduction to Adaptive Vision for Human Robot Collaboration, Dimitri Ognibene.
Introduction to adaptive vision and brief description of bayesian and neural adaptive vision systems for human robot interaction. - Ecological perception: a computational model, Fabio Solari.
A computational model of visual perception for action tasks. How the modeled perception can inform the design of human-robot interaction systems. - Attention during social interaction, Tom Foulsham.
A review of work from experimental psychology which examines how humans pay attention to each other during conversation and other interactive situations. Studying this behaviour requires moving to more ecologically valid situations, and the results have implications for real and virtual interaction. - Introduction to the Projective Consciousness Model, David Rudrauf.
Emergent psychology-inspired cybernetic frameworks for integrating perception, imagination, emotion, social cognition and action in global optimization solutions for autonomous virtual and robotic agents. - Adaptive vision strategies to cope with complex environment under bounded resources, Guido De Croon.
Presentation of several adaptive vision strategies implemented enabling robots with limited computational resources to perform complex tasks. - Introduction to Egovision in Human Robot Interaction, Giovanni Farinella.
Egovision provides important information for human machine interaction and poses specific problems which require insights from both cognitive and machine learning side. - Ecological interaction in Virtual and Augmented Reality, Manuela Chessa.
Virtual and Augmented Reality (VR/AR) environments provide novel interaction modalities. On the one hand, we can devise natural and ecological techniques that mimic real-world situations, on the other hand we aim to understand whether VR/AR could enhance the cognitive performance in several fields of applications (e.g. rehabilitation or training tasks) by exploring novel paradigms of interaction. - Modelling and imitation attentional behaviours in complex tasks, Fiora Pirri.
Human visual exploration provides an important source of information to enable robot vision with task specific selection strategies necessary to deal with real world complexity. Techniques for recording and replication in robot of such strategies will be reviewed. - Attention Measurement Technologies for Situation Awareness and Motivation in Human-Robot Collaboration, Lucas Paletta.
The organisation of attention is investigated in the context of situation awareness, task coordination and mental processes. Classification of gaze behavior in reference with ecological semantics is applied to assistance in assembly as well as in health care.
For more details please follow this link.
Poster Session 1 [Monday, Sep 23 @ 14:00-15:30]
Hall : Alexandros II
- "Comparing Ellipse Detection and Deep Neural Networks for the Identification of Drinking Glasses in Images"
Abdul Jabbar, Alexandre Mendes, and Stephan Chalup - "Multi-scale Relation Network for Few-shot Learning based on Meta-learning"
Yueming Ding, Xia Tian, Lirong Yin, Xiaobing Chen, Shan Liu, Wenfeng Zheng - "Point Pair Feature Matching: Evaluating Methods to Detect Simple Shapes"
Markus Ziegler, Martin Rudorfer, Xaver Kroischke, Sebastian Krone, Jörg Krüger - "Color Calibration on Human Skin Images"
Mahdi Amani, Havard Falk, Oliver Damsgaard Jensen, Gunnar Vartdal, Anders Aune, Frank Lindseth - "Multi-DisNet: Machine learning-based object distance estimation from multiple cameras "
Haseeb Muhammad Abdul, Ristić-Durrant Danijela, Gräser Axel, Banić Milan, Stamenković Dušan - "Deep Residual Temporal Convolutional Networks for Skeleton-Based Human Action Recognition"
R. Khamsehashari, K. Gadzicki, C. Zetzsche - "Data anonymization for data protection on publicly recorded data"
David Munch, Ann-Kristin Grosselfinger, Erik Krempel, Marcus Hebel, Michael Arens - "Water Streak Detection with Convolutional Neural Networks for Scrubber Dryers"
Uriel Jost, Richard Bormann - "Segmenting and detecting nematode in coffee crops using aerial images"
Alexandre J. Oliveira, Gleice A. Assis, Vitor Guizilini, Elaine R. Faria, Jefferson R. Souza - "QuiltGAN: an adversarially trained, proceduralalgorithm for texture generation"
Renato Barros Arantes, George Vogiatzis, Diego Faria - "A Sequential Approach for Pain Recognition based on Facial Representations"
Antoni Mauricio, Fabio Cappabianco, Adriano Veloso, Guillermo Camara
Poster Session 2 [Tuesday, Sep 24 @ 14:00-15:30]
Hall : Alexandros II
- "Hardware accelerated image processing on an FPGA-SoC based vision system for closed loop monitoring and control process"
Dietmar Scharf, Bach Le Viet, Thi Bich Hoa Le, Janine Rechenberg, Stefan Tschierschke, Ernst Vogl - "Adaptive Reference-Free Attitude Determination Method Using Low-Cost MARG Sensors"
Jian Ding, Jin Wu, Mingsen Deng, Ming Liu - "6D Gripper Pose Estimation from RGB-D Image"
Qirong Tang, Xue Hu, Zhugang Chu, Shun Wu - "Robust Rotation Interpolation Based on SO(3) Geodesic Distance"
Jin Wu, Ming Liu, Jian Ding, Mingsen Deng - "A novel multi-modal detection method for hyperbola signatures on BScan images"
Evangelos Skartados, Ioannis Kostavelis, Dimitrios Giakoumis, Dimitrios Tzovaras - "Intersection Recognition Using Results of Semantic Segmentation for Visual Navigation"
Hiroki Ishida, Kouchi Matsutani, Miho Adachi, Shingo Kobayashi, Ryusuke Miyamoto - "Autonomous MAV Navigation in Underground Mines Using Darkness Contours Detection"
S. S. Mansouri, M. Castano, C. Kanellakis, G. Nikolakopoulos - "Image enhancing in poorly illuminated subterranean environments for MAV applications: A comparison study"
Christoforos Kanellakis, Petros Karvelis, George Nikolakopoulos - "Improving Traversability Estimation through Autonomous Robot Experimentation"
Christos Sevastopoulos, Katerina Maria Oikonomou, Stasinos Konstantopoulos - "Robust Optical Flow Estimation Using the Monocular Epipolar Geometry"
Mahmoud A. Mohamed, Bärbel Mertsching - "Automatic detection of obstacles in railway tracks using monocular camera"
Guilherme Kano, Tiago Andrade, Alexandra Moutinho